
Products
volvunt materiae tractantem tractantem
Brevis descriptio:
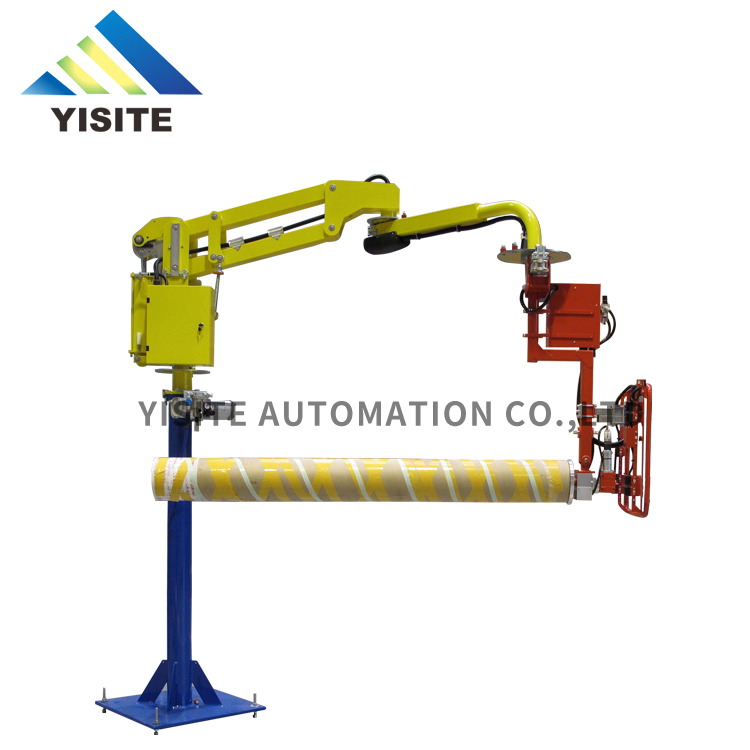
Manipulator pneumaticus, etiam notus ut manipulator, libra gruis, statera cursus, onus manualis apparatus translatio (supra propositio non est professio sed popularis in Sinis), nova est, adhibita ad materiam tractandam et institutionem ac laboris salutaris operationis instrumenti virtutis.
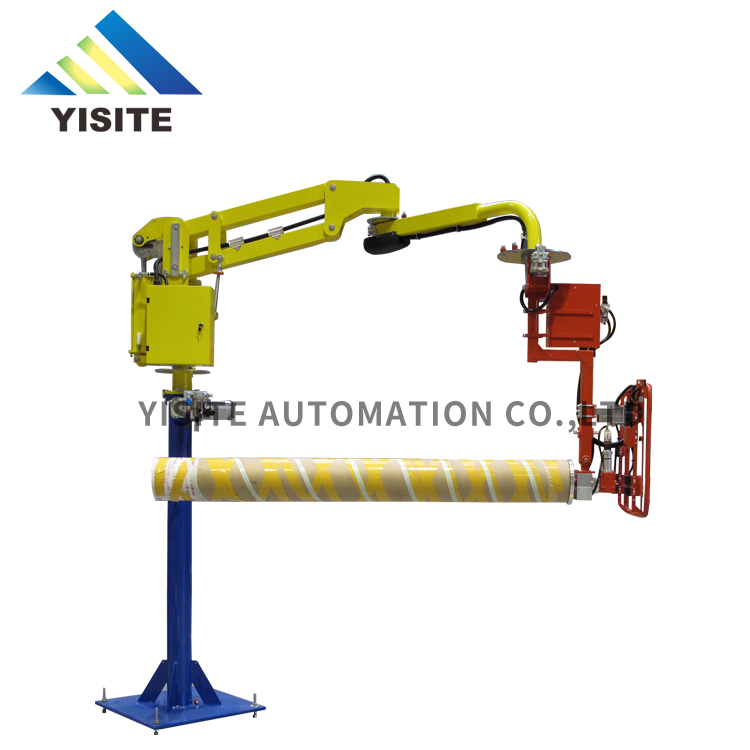
volumen materiae tractantem tractantem applicat stateram principium virium, ut operator grave impellere et trahere potest secundum quod potest aequare situm movens in spatio. Grave objectum fluitantem statum attollens vel decrescens et vim non-operationem efficit. via gasi praestatur (processus processus et consilium sumptum imperium, vis operationis minor 3kg quam vexillum iudicium) vis operationis afficitur opus fragmen pondus laborantis piece. Sine operandi peritus, operans potest. impellas et trahes grave manu et pone pondus proprie quovis loco in spatio.

de nobis

Lorem automation armorum fabrica professionalis sumus. Producta nostra includunt depalletizent, colligunt et locum machinam sarcinam, palletizer, robot integrationem applicationis, onerantes et exonerantes manipulatores, lobortis formans, lobortis obsignatio, grabatus dispensor, machina involutio et aliae solutiones automationis pro linea productionis packaging retro-finis.
Nostra regio officina est circiter 3,500 metra quadrata. Core technica turma mediocris 5-10 annos experientiae in automatione mechanica habet, inter 2 mechanicas machinas. 1 fabrum programmandi, 8 operarios conventus, 4 post-venditio debugging persona, et alii 10 opifices
Principium nostrum est "mos primus, qualitas prima, fama prima", semper nostris clientibus adiuvamus "facultas productionis augere, sumptus minuere, qualitatem emendare" nitimus ut summum supplementum fieri in machina automationis industria.
Product features
- 1. Cum torques generatur, officina cassavit vel inclinavit, et planta altitudo terminatur.
2. Totum processum est "natare", quod vim maximam minuit consumptio opificum tractandorum operum.
3. Instrumentum fracto instructus ad iuncturam gyratam efficaciter claudendam ne calliditate.
4. Gas protectionem et terrorem frangunt, se-cincinnum ne cadant cum pressura aeris guttae.
5. Fabricae partes tutelae et temperantiae ad vitandum impulsum et pulverem coacervationis accidentalis, et operationem stabilem praecisionis elementorum curant.







