Products


Unius columnae intelligentia 3 axis servo automatice positis stipare manipulator pro lobortis positis
Brevis descriptio:
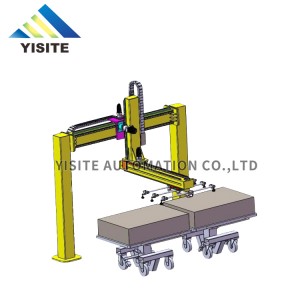
Unius columnae positis sarcina manipulatoris pro lobortis consistit in columna et bracchium plicatile horizontale in columna constitutum. Columna in basi gyratorius installatur. Brachium horizontale libere plicari et retractari potest, et per agmen sursum deorsumque moveri. Hoc genus robot tres axes rotationis habet et axem elevatum sursum deorsumque.
Unius columnae positis sarcina manipulator pro lobortis basi institutionem includit, primus machinam occisionis, dux verticalis cancelli, mechanismus verticalis lapsus, bracchium servo coegi unitas, finis servo coegi unitas, etc. Secundum ad mechanismum illapsum verticalem et mechanismum bracchium horizontale valvatum; materia in scopum posita est accurate et efficaciter, salvis humanis sumptibus.
Unius columnae positis sarcina manipulator pro lobortis parvum spatium occupat, est valde frugi et practicus, facile est instituere et movere, et ad mercatum accommodatius est.


de nobis

Lorem automation armorum fabrica professionalis sumus. Producta nostra includunt depalletizent, colligunt et locum machinam sarcinam, palletizer, robot integrationem applicationis, onerantes et exonerantes manipulatores, lobortis formans, lobortis obsignatio, grabatus dispensor, machina involutio et aliae solutiones automationis pro linea productionis packaging retro-finis.
Nostra regio officina est circiter 3,500 metra quadrata. Core technica turma mediocris 5-10 annos experientiae in automatione mechanica habet, inter 2 mechanicas machinas. 1 fabrum programmandi, 8 operarios conventus, 4 post-venditio debugging persona, et alii 10 opifices
Principium nostrum est "mos primus, qualitas prima, fama prima", semper nostris clientibus adiuvamus "facultas productionis augere, sumptus minuere, qualitatem emendare" nitimus ut summum supplementum fieri in machina automationis industria.
Carton positis manipulator characteres
1. Commoda moderatio: PLC + ostentationis velum imperium, operandi, administrationis valde facilitas, ad personas producendas et intensio laboris minuenda, essentialis apparatus productionis scalae automated est.
2. Opportuna operatio: reducere sumptus packaging, praesertim apta ad negotium cum spatio parvo et exiguo output.
3. Operatio non exactoris: praesertim cum machina fasciculi anterioris et posterioris, sicut finis anteriori latis pacto, stipendio et obsignando; dorsum finem cum ACERVUS latis copia apparatus, gladius fasciculus, machina involutio et alia instrumenta packaging, ad cognoscendum automatarium inanibus packaging et repositione. Angulus ratio, solida structura, bonis gravioribus apta.
Three-axis servo palletizing tractatori descriptionem
Cartons packaged ponuntur per traditionem ad aream designatam palletizing, servo tassatori posito brachii extenso et cyathis suctionis directe supra lobortis positionis, Cum editur positio signi lobortis, Cantilever deorsum (Z motus axialis) a servo regitur. motor, Cum suctus absorbabilis altitudo pervenit, Cantilever cessat cadens, Vacuum suctio aperta, Postquam absorbens lobortis, Coverlever Seromotor inversio, Cantilever ad tutam altitudinem elevatus, Motus cantilever per motorem dextrum et dextrum servo, Positio cantileveri motus directe supra situm desideratum (motus X-axis), (motus Z-axis) Post positionem supra, Cantilever oritur deorsum servo motore incipienti movendo, Move ad positionem (discus laxae suctionis, Automate altitudinem inveniendo. lobortis), Codicis lobortis in determinatis locationibus. Repetere actionem praedictam, post totum palletizing, exterreri, buzzer, admonere palletizing expletum esse. Ianitor ferculum reclinatum tollit, immittit in novum ferculum; et reciprocum. (Populus suctus in cantilever etiam movere potest axem Y-per servo motore, ad determinatum positionem movens, et 3-axis simul moveri potest.


Product technica parametri
1)Machine size:L2400*W2200* H2800mm
2)clamp:gripper
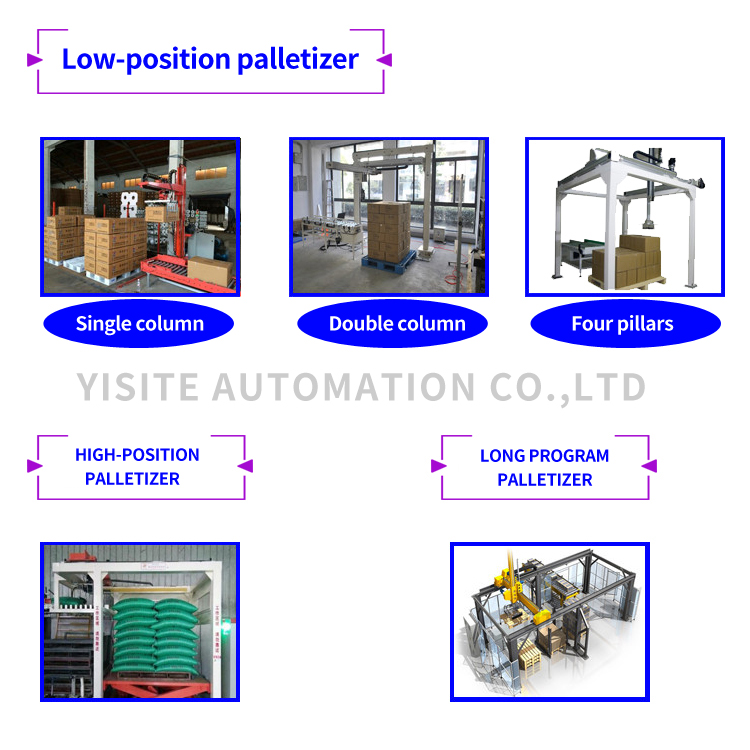
III, positis genus secundum ipsum requirere
3)celeritate 6-7 lobortis/minute
4)pondus 700Kg
5) Voltage:380V 50/60Hz
6)Air resource:0.6-0.8mpa
7)Material:carbon steel,plastic imbre pictura
8)PLC: Mitsubishi
9)servoMitsubishi
10)Pneumatica elementa:SMC
11)photoelectric componentsOmron
12)Carton size:L200-600*W150-500*H150-500mm